시그널(Signal) 기본 개념
시그널이란?
시그널(Signal)은 소프트웨어 인터럽트로, 프로세스에 뭔가 발생했음을 알리는 메시지를 비동기적으로 보내는 메커니즘이다.
IPC(Inter Process Communication)
프로세스 간 정보를 주고받는 통신 방법으로는 다음과 같은 방법들이 있다.
- 파이프(Pipe)
- 시그널(Signal)
- 공유 메모리(Shared Memory)
- 메시지 큐(Message Queue)
- 세마포어(Semaphore)
시그널의 유형
- Reliable Signals → 일반적인 시그널
- Real-time Signals → 실시간 시그널 - 데이터를 함께 전달할 수 있는 시그널로 일반 시그널보다 복잡함
시그널이 발생하는 경우
- 0으로 나누기처럼 프로그램에서 예외적인 상황이 일어나는 경우
- 프로세스가 다른 프로세스에 시그널을 보내는 경우
- 사용자가 Ctrl + C 같은 인터럽트 키를 입력한 경우
시그널과 프로세스 상태
시그널 처리는 프로세스의 실행 상태와 밀접한 관련이 있다.
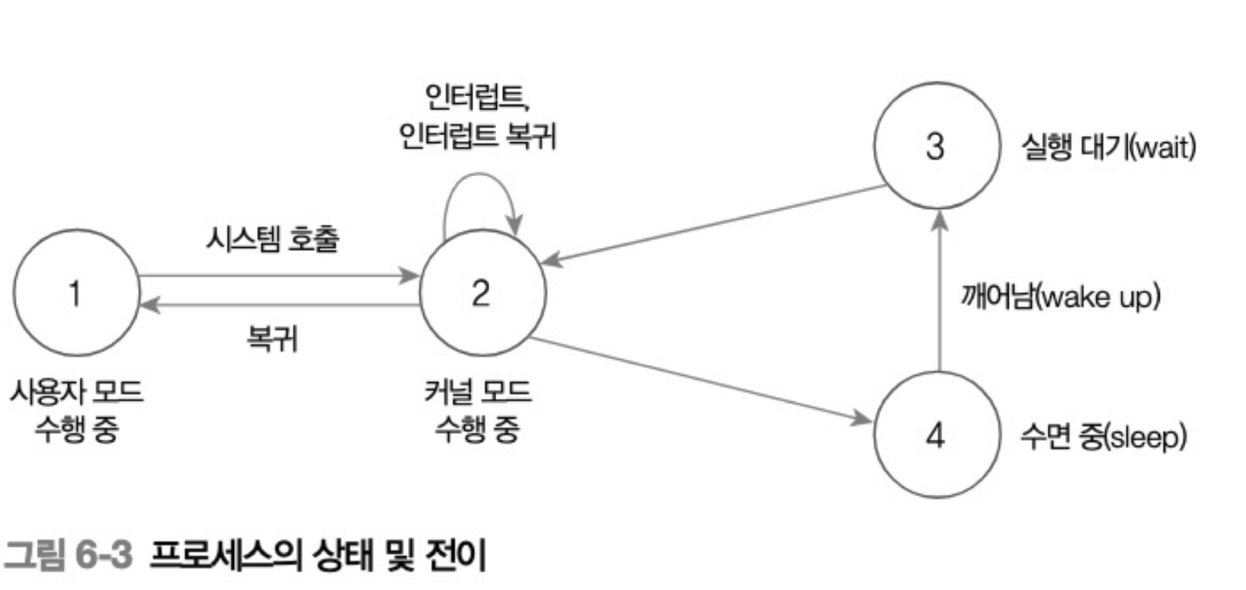 *프로세스 상태 전환 다이어그램*
*프로세스 상태 전환 다이어그램*
시그널 처리 방법
시그널을 받은 프로세스가 이를 처리하는 방법은 네 가지가 있다.
1. 기본 동작 수행
각 시그널에는 기본 동작(default action)이 지정되어 있으며, 대부분의 경우 프로세스를 종료한다. 이 외에 시그널을 무시하거나 프로세스의 수행을 잠시 중지하거나 재시작하는 등의 기본 동작이 있다.
2. 시그널 무시
프로세스가 시그널을 무시하기로 지정하면 시스템은 프로세스에 시그널을 전달하지 않는다.
3. 지정된 함수 호출
프로세스는 시그널 핸들러(signal handler)를 지정해 시그널을 받으면 해당 함수로 처리할 수 있다.
4. 시그널 블록
프로세스의 특정 부분이 실행되는 동안에만 시그널이 발생하지 않도록 블로킹할 수 있다. 블로킹된 시그널은 큐에 쌓여 있다가 시그널 블록이 해제되면 그때 전달된다.
주요 시그널 종류
시그널은 signal.h 헤더 파일에 정의되어 있다.
주요 시그널 목록
| 시그널 | 번호 | 기본 처리 | 발생 조건 |
|---|---|---|---|
| SIGHUP | 1 | 종료 | 행업으로 터미널과 연결이 끊어짐 때 발생 |
| SIGINT | 2 | 종료 | 인터럽트로 사용자가 Ctrl + C를 입력하면 발생 |
| SIGQUIT | 3 | 코어 덤프 | 종료 신호로 사용자가 Ctrl + \ 를 입력하면 발생 |
| SIGILL | 4 | 코어 덤프 | 잘못된 명령 사용 |
| SIGTRAP | 5 | 코어 덤프 | 추적(trace)이나 브레이크 지점(break point)에서 트랩 발생 |
| SIGABRT | 6 | 코어 덤프 | abort() 함수에 의해 발생 |
| SIGBUS | 7 | 코어 덤프 | 버스 오류로 발생 |
| SIGFPE | 8 | 코어 덤프 | 산술 연산 오류로 발생 |
| SIGKILL | 9 | 종료 | 강제 종료로 발생 |
| SIGUSR1 | 10 | 종료 | 사용자가 정의해 사용하는 시그널 1 |
| SIGSEGV | 11 | 코어 덤프 | 세그먼테이션 오류로 발생 |
| SIGUSR2 | 12 | 종료 | 사용자가 정의해 사용하는 시그널 2 |
| SIGPIPE | 13 | 종료 | 잘못된 파이프 처리로 발생 |
| SIGALRM | 14 | 종료 | alarm() 함수에 의해 발생 |
| SIGTERM | 15 | 종료 | 소프트웨어 종료로 발생 |
| SIGCHLD | 17 | 무시 | 자식 프로세스의 상태가 바뀌었을 때 발생 |
| SIGCONT | 18 | 무시 | 중지된 프로세스를 재시작할 때 발생 |
| SIGSTOP | 19 | 중지 | 중지(stop) 시그널로, 이 시그널을 받으면 SIGCONT 시그널을 받을 때까지 프로세스 수행을 중단 |
| SIGTSTP | 20 | 중지 | 사용자가 Ctrl + z 로 중지시킬 때 발생 |
Default Action 종류
- 종료 → 프로세스를 그냥 종료시킴
- 코어 덤프(core dump) → 코어 파일을 만들고 종료시킴
시그널 보내기
프로세스 식별과 시그널
프로세스 간 시그널 통신을 이해하기 위해서는 프로세스 식별 방법을 알아야 한다.
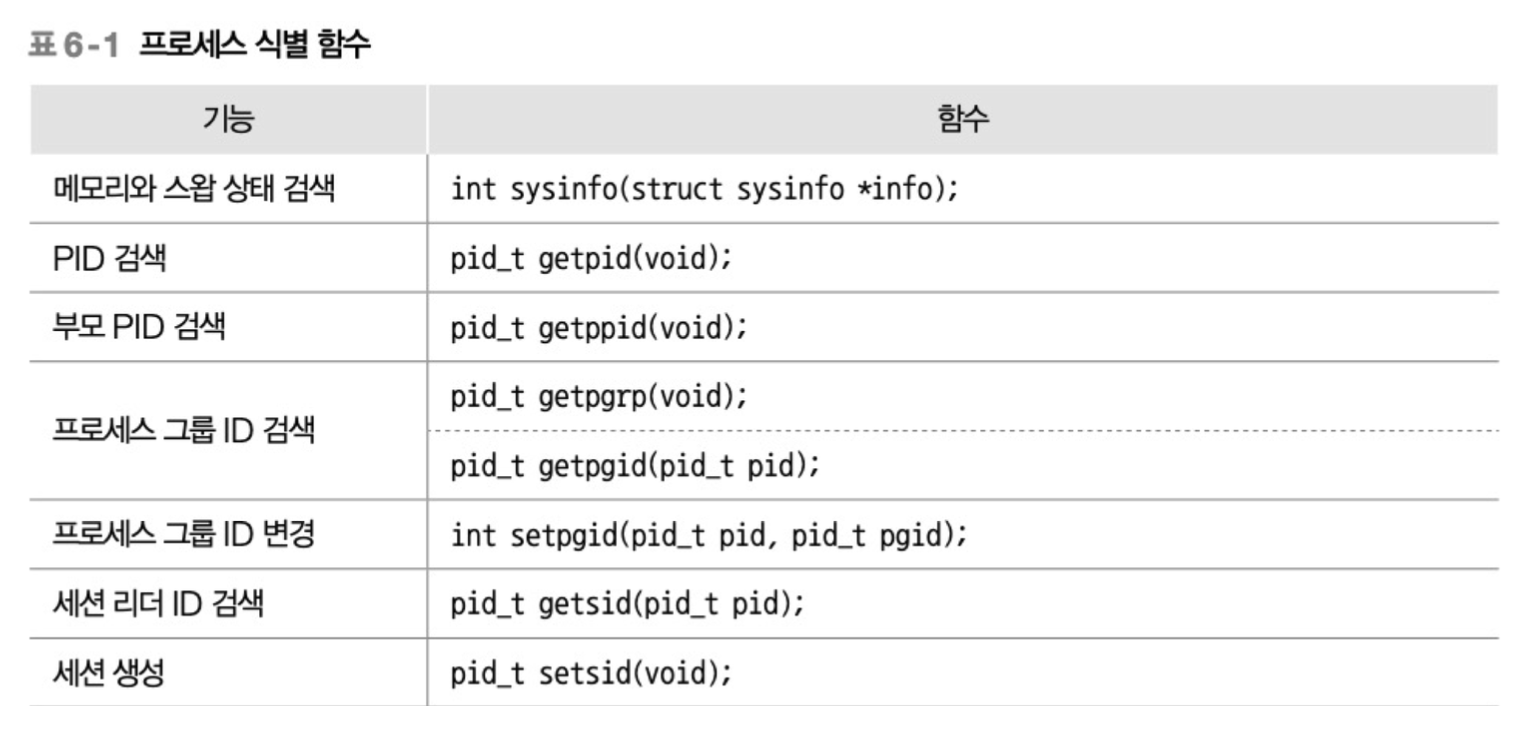 프로세스 식별 방법 - PID와 PPID를 통한 프로세스 관계
프로세스 식별 방법 - PID와 PPID를 통한 프로세스 관계
kill() 함수
프로그램에서 시그널을 보내려면 kill(), raise(), abort() 함수가 있는데 kill() 함수가 가장 많이 사용된다.
#include <sys/types.h>
#include <signal.h>
int kill(pid_t pid, int sig);- pid: 프로세스 ID 또는 프로세스 그룹 ID
- sig: 시그널 번호
PID에 따른 케이스
- kill(< -1, sig): 해당 PID의 절댓값과 같은 PGID 그룹에 시그널 보낸다
- kill(-1, sig): 가능한 모든 프로세스에 시그널 보낸다 (보통 root 전용)
- kill(0, sig): 현재 프로세스 그룹에 속한 모든 프로세스에게 시그널 보낸다
- kill(> 0, sig): 해당 PID 프로세스에 시그널 보낸다
예시:
#include <sys/types.h>
#include <unistd.h>
#include <signal.h>
#include <stdio.h>
int main() {
printf("Before SIGCONT Signal to parent.\n");
kill(getppid(), SIGCONT); // 부모 프로세스에 SIGCONT 시그널을 보냄
printf("Before SIGQUIT Signal to me.\n");
kill(getpid(), SIGQUIT); // 현재 프로세스(자신)에 SIGQUIT 시그널을 보냄
printf("After SIGQUIT Signal\n");
return 0;
}raise() 함수
int raise(int sig);함수를 호출한 현재 프로세스에 시그널을 보내는 함수
리턴 값:
- 성공시 0
- 실패시 -1
- 만약 시그널 핸들러 함수가 호출되는 경우 리턴하지 않음
abort() 함수
void abort(void);함수를 호출한 현재 프로세스에 SIGABRT 시그널을 보내는 함수. SIGABRT는 프로세스를 비정상적으로 종료시키고 코어 덤프 파일을 생성하는 시그널이다.
시그널 핸들러 함수
프로세스가 시그널을 받을 때 수행하는 기본적인 처리는 프로세스를 종료하는 것이지만, 프로세스를 종료하기 전 처리할 작업이 남아 있거나 특정 시그널은 종료하지 않고 싶은 경우 시그널 핸들러 함수를 지정한다.
signal() 함수
#include <signal.h>
sighandler_t signal(int signum, sighandler_t handler);시그널을 처리하는 가장 단순한 함수로, 시그널을 받을 때 해당 시그널을 처리할 함수나 상수를 지정할 수 있다.
예시:
#include <unistd.h>
#include <signal.h>
#include <stdio.h>
#include <stdlib.h>
void sig_handler(int signo) {
printf("Signal Handler signum: %d\n", signo);
psignal(signo, "Received Signal");
}
int main() {
void (*hand)(int);
// SIGINT 시그널의 시그널 핸들러를 지정
hand = signal(SIGINT, sig_handler);
if(hand == SIG_ERR) {
perror("signal");
exit(1);
}
printf("Wait 1st Ctrl+C... : SIGINT\n");
pause();
printf("Wait 2nd Ctrl+C... : SIGINT\n");
pause();
printf("After 2nd Signal Handler\n");
return 0;
}시그널 집합 (Signal Set)
POSIX에서 다수의 시그널을 처리하기 위해 도입한 개념으로, 시그널을 비트 마스크로 표현한 것이다.
typedef struct {
unsigned long _val[_NSIG_WORDS];
} sigset_t;시그널 집합 처리 함수
int sigemptyset(sigset_t *set); // 시그널 집합을 빈 집합으로 만듦
int sigfillset(sigset_t *set); // 모든 시그널을 포함하는 집합으로 만듦
int sigaddset(sigset_t *set, int signum); // 시그널 집합에 시그널 추가
int sigdelset(sigset_t *set, int signum); // 시그널 집합에서 시그널 삭제
int sigismember(const sigset_t *set, int signum); // 시그널이 집합에 있는지 확인예시:
#include <signal.h>
#include <stdio.h>
int main() {
sigset_t st;
// 시그널 집합을 모두 비운다
sigemptyset(&st);
// 시그널 집합에 SIGINT와 SIGQUIT 시그널을 추가한다
sigaddset(&st, SIGINT);
sigaddset(&st, SIGQUIT);
if (sigismember(&st, SIGINT)) {
printf("SIGINT has been set.\n");
}
// 시그널 집합에 설정된 값을 16진수로 출력
printf("** Bit Pattern: %lx\n", st.__val[0]);
return 0;
}고급 시그널 제어: sigaction() 함수
signal(), sigset() 함수처럼 시그널을 받았을 때 처리할 수 있는 핸들러 함수를 포함하는 act 구조체를 받아 사용한다. 즉 더 많은 제어를 할 수 있는 함수다.
sigaction 구조체
struct sigaction {
int sa_flags;
union {
void (*sa_handler)();
void (*sa_sigaction)(int, siginfo_t *, void *);
} _funcptr;
sigset_t sa_mask;
};- sa_flags: 플래그에 따른 케이스
- SA_INFO 설정되어 있는 경우 → sa_handler 핸들러 함수 사용
- SA_INFO 설정 안 되어 있는 경우 → sa_sigaction 멤버 사용
- sa_mask: 시그널 집합
sigaction() 함수
int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact);- act.sa_handler → 시그널 핸들러 지정
- act.sa_flags → 시그널 전달 방법을 플래그로 지정
- act.sa_mask → 시그널 집합을 지정 (블로킹)
예시:
#include <signal.h>
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
void sig_handler(int signo) {
psignal(signo, "Received Signal:");
sleep(5);
printf("In Signal Handler, After Sleep\n");
}
int main() {
struct sigaction act;
sigemptyset(&act.sa_mask);
// 시그널 핸들러가 동작하는 중에 SIGQUIT 시그널을 블로킹
sigaddset(&act.sa_mask, SIGQUIT);
act.sa_flags = 0;
act.sa_handler = sig_handler;
// SIGINT 시그널을 받을 경우 시그널 핸들러가 동작하도록 설정
if(sigaction(SIGINT, &act, (struct sigaction *)NULL) < 0) {
perror("sigaction");
exit(1);
}
fprintf(stderr, "Input SIGINT: ");
pause(); // 시그널이 올 때까지 대기
fprintf(stderr, "\nAfter Signal Handler\n");
return 0;
}시그널 동시성 문제와 해결방법
시그널 동시성 문제
main() 함수와 시그널 핸들러 함수가 전역 변수에 동시에 접근할 수 있어 경쟁 조건(race condition)이 발생할 수 있다.
시그널 블로킹: sigprocmask() 함수
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset);현재 프로세스의 시그널 마스크(시그널 집합)을 읽고 설정(블로킹)할 수 있는 함수
how 인자 값:
- SIG_BLOCK: oldset에 set 시그널들을 추가 (블로킹 설정)
- SIG_UNBLOCK: set에 포함된 시그널들을 oldset에서 삭제 (블로킹 해제)
- SIG_SETMASK: oldset을 set으로 교체
동시성 문제 해결 예시:
int main(int argc, char *argv[]) {
// 시그널 핸들러 등록
signal(SIGINT, handler);
// SIGINT를 블로킹할 집합 준비
sigset_t block_set, old_set;
sigemptyset(&block_set);
sigaddset(&block_set, SIGINT);
// SIGINT 블로킹 시작 → 시그널 핸들러 재진입 방지
sigprocmask(SIG_BLOCK, &block_set, &old_set);
// 이 부분은 안전함. 시그널 핸들러와 동시에 실행되지 않음
prepend(new_listnode());
// 다시 SIGINT 허용
sigprocmask(SIG_SETMASK, &old_set, NULL);
return 0;
}시그널과 점프: sigsetjmp/siglongjmp
Context Switch
현재 상태를 저장하고 다른 컨텍스트로 전환하는 것을 의미한다.
같은 프로세스임에도 핸들러 함수로의 컨텍스트 전환이 발생하게 된다.
sigsetjmp() 함수
int sigsetjmp(sigjmp_buf env, int savemask);복귀 지점을 설정하는 함수로, 처음 호출 시 0을 리턴한다.
- env: 점프 정보를 저장하는 구조체 (레지스터, 스택 포인터, PC 등)
- savemask: 시그널 마스크 저장할지 유무 옵션
siglongjmp() 함수
void siglongjmp(sigjmp_buf env, int val);복귀 지점(val)으로 복귀하는 함수로, setjmp에서 리턴한 val을 인자로 사용하여 빠져나온다.
예시:
#include <stdio.h>
#include <signal.h>
#include <setjmp.h>
#include <unistd.h>
// 전역 점프 버퍼 선언
static sigjmp_buf buf;
// 시그널 핸들러 함수
void handler(int sig) {
// 저장된 지점으로 복귀하면서 sigsetjmp의 반환값을 1로 설정
siglongjmp(buf, 1);
}
int main() {
// 처음 호출 시에는 0을 반환하고, siglongjmp로 돌아오면 1을 반환함
if (!sigsetjmp(buf, 1)) {
// 초기 실행 시 → 핸들러 등록
signal(SIGINT, handler);
puts("starting");
} else {
// Ctrl+C를 눌러 siglongjmp로 되돌아온 경우
puts("restarting");
}
// 무한 루프: 1초마다 "processing..." 출력
while (1) {
sleep(1);
puts("processing...");
}
return 0;
}